")
")
")
")
Realne stany magazynowe
 Zamów i zapłać do 13:00
Zamów i zapłać do 13:00
wysyłka tego samego dnia roboczego

Jasne zasady i odpowiedzialna obsługa po zakupie
These aluminum gearmotor brackets let you securely mount Pololu’s 25D mm metal gearmotors to your project. The brackets are sold inpairs, and each bracket includes four M3 screws for securing the motor to the bracket. Each bracket also features seven mounting holes and fourteen mounting slots for M3 or #4-size screws (not included), giving you a variety of mounting options.
These light-weight brackets (about 8 g each) are specifically designed for the Pololu 25D mm metal gearmotors, including the same motors used in the Wild Thumper chassis. Each bracket features seven mounting holes and fourteen mounting slots (seven along each edge) for M3 or #4-size screws, giving you a variety of mounting options. A total of four M3 screws (two for each bracket) are included for securing the motors to the brackets.
Our 4mm mounting hub works nicely with this bracket.
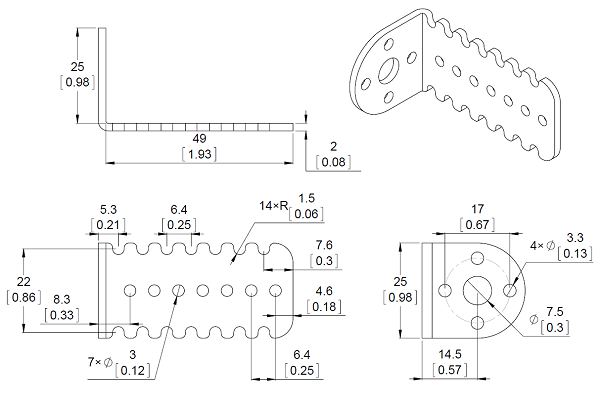 |
| Mechanical drawing for the Pololu 25D mm metal gearmotor bracket. |
|---|
This drawing is also available as a downloadable PDF (77k pdf).
Note: As of February 25, 2014, the thickness of these brackets has increased from 1.5 mm to 2 mm.
| Weight: | 8.2 g1 |
|---|
Używamy plików cookie, aby strona działała, była bezpieczniejsza oraz — jeśli wyrazisz zgodę — mierzyć ruch i personalizować treści lub reklamy. Ustawienia możesz zmienić w każdej chwili. Polityka cookies · Polityka prywatności
Ustawienia ciasteczek
Rozwiń sekcję, by przeczytać, do czego służy kategoria. Wymaganych ciasteczek nie da się wyłączyć. Polityka cookies · Polityka prywatności
Są niezbędne do działania sklepu (sesja, bezpieczeństwo, koszyk). Nie możesz z nich zrezygnować.
Pomagają mierzyć wizyty i sposób korzystania ze strony (np. Google Analytics). Ładowane tylko po włączeniu tej kategorii.
Służą do dopasowania treści lub reklam i mierzenia kampanii (np. piksele remarketingu). Włącz tylko, jeśli wyrażasz zgodę.